Bahan Presentasi dibuat untuk Memenuhi MatakuliahJaringan Syaraf Tiruan
Semester Genap 2018-2019
Dosen : Darwison, MT
Dio Okta Mandala
(1610951034)

Dosen : Darwison, MT
Dio Okta Mandala
(1610951034)

Referensi :
- Henry Novianto, Dwi Cahyono, 2016 "Sistem Pintu Air Otomatis Menggunakan Logika Fuzzy" : Universitas Dr. Soetomo, Surabaya
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS ANDALAS
PADANG
2019
Referensi :
- Henry Novianto, Dwi Cahyono, 2016 "Sistem Pintu Air Otomatis Menggunakan Logika Fuzzy" : Universitas Dr. Soetomo, Surabaya
JURUSAN TEKNIK ELEKTROPADANG
2019
Sistem Pintu Air Otomatis
Menggunakan Logika Fuzzy
1. Tujuan[kembali]
Tujuan dari aplikasi UAS mata kuliah ini adalah merancang sistem pintu air otomatis dengan sensor ultrasonik menggunakan logika fuzzy.
Tujuan dari aplikasi UAS mata kuliah ini adalah merancang sistem pintu air otomatis dengan sensor ultrasonik menggunakan logika fuzzy.
Di era modern ini, perkembangan teknologi semakin
cepat dan inovatif. Terutama pada bidang teknologi yang serba terkomputerisasi. Saat ini sistem
tidak hanya ditanamkan (Embedded System) pada komputer saja, melainkan
dapat pula ditanamkan pada sebuah kepingan IC mikrokontroler. Teknologi sensor dan penggerak (actuator)
juga mengalami perkembangan yang sangat signifikan. Berbagai sistem otomatisasi dapat
dibangun dengan teknologi-teknologi mikrokontroler, sensor dan penggerak, yang sangat membantu
kegiatan manusia. Kedepan teknologi otomatisasi akan menjadi prioritas utama untuk diteliti,
selain penelitian mengenai sumberdaya terbarukan dan lain sebagainya. Saat ini pengaturan pintu air
masih dilakukan oleh petugas yang bersangkutan. Sistem pengaturan pintu manual masih
banyak kelemahan, diantaranya: meluapnya air sungai sampai ke-pemukiman penduduk yang mengakibatkan
banjir serta dampak yang negative bagi penduduk sekitar. Dalam Love and Josephson, 2004, Hagan
dan Mays (1981) mendefinisikan human error sebagai “kegagalan dari manusia untuk
melakukan tugas yang telah didesain dalam batas ketepatan, rangkaian, atau waktu tertentu”. kelemahan-kelemahan
keaman pintu di atas, sangat riskan dan merugikan.
·
Logika Fuzzy Sugeno
Logika Fuzzy Sugeno
Perancangan pintu air otomatis ini menggunakan
metode Logika Fuzzy yaitu peningkatan dari logika Boolean yang mengenalkan
konsep kebenaran sebagian. Di mana logika klasik menyatakan bahwa segala hal dapat diekspresikan
dalam istilah binary (0 atau 1, hitam atau putih, ya atau tidak),
logika fuzzy menggantikan kebenaran boolean dengan tingkat kebenaran. Sedangkan
Logika Fuzzy sugeno adalah Penalaran dengan metode Sugeno hampir sama dengan
penalaran Mamdani, hanya saja output (konsekuen) sistem tidak berupa himpunan fuzzy, melainkan
berupa konstanta atau persamaan linear. Michio Sugeno mengusulkan penggunaan singleton sebagai
fungsi keanggotaan dari konsekuen. Singleton adalah sebuah himpunan fuzzy dengan fungsi
keanggotaan yang pada titik tertentu mempunyai sebuah nilai dan 0 di luar titik tersebut. Ada 2 model
fuzzy dengan metode Sugeno yaitu sebagai berikut:
·
Orde-Nol, Bentuk Umum
:
IF (X is A ) (X is A ) (X is A
) (X is A ) THEN z = k
dengan Ai adalah himpunan fuzzy ke-I sebagai anteseden,
dan k adalah konstanta (tegas) sebagai konsekuen.
·
Orde-satu, Bentuk Umum :
IF (X is A ) …. (X is A ) THEN
z = p
dengan Ai adalah himpunan fuzzy ke-I sebagai anteseden,
dan pi adalah suatu konstanta ke-I dan q merupakan konstanta dalam konsekuen. Perbedaan antara
Mamdani dan Sugeno ada pada konsekuen. Sugeno menggunakan konstanta atau fungsi matematika
dari variabel input:
IF x is A
AND y is B THEN z is f(x, y)
dimana x, y dan z adalah
variabel linguistik; A dan B himpunan fuzzy untuk X dan Y, dan f(x, y) adalah
fungsi matematik.
IF x is A
AND y is B THEN z is k
·
Definisi Raspberry Pi
Raspberry Pi adalah komputer berukuran kartu
kredit yang dikembangkan di Inggris oleh Yayasan Raspberry Pi dengan tujuan untuk mempromosikan
pengajaran ilmu pengetahuan dasar komputer di sekolah. Raspberry Pi diproduksi melalui
lisensi manufaktur yang berkaitan dengan elemen 14/ Premier Farnell dan RS komponen.




·
Sensor Ultrasonik
Sensor Ultrasonik merupakan sensor ultrasonik
yang dapat mendeteksi jarak obyek dengan cara memancarkan gelombang ultrasonic dengan
frekuensi 40 KHz dan kemudian mendeteksi pantulannya. Sensor ini dapat mengukur
jarak antara 3 cm sampai 300 cm. keluaran dari sensor ini berupa pulsa yang lebarnya merepresentasikan
jarak.

Gambar
1. Sensor Ultrasonik
Lebar pulsanya bervariasi dari 115 uS sampai 18,5 mS.
Pada dasanya, terdiri dari sebuah pembangkit sinyal 40KHz, sebuah speaker ultrasonik
dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi
suara sementara mikropon ultra berfungsi untuk mendeteksi pantulan suaranya.
·
Relay

Gambar
2. Struktur Relay
Relay
merupakan sebuah komponen elektromagnetik yang dapat mengubah kontak kontak
saklar yang ada di dalamnya pada waktu mendapat sinyal listrik
·
Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi
rangkaian kendali dengan system closed feedback yang terintegrasi
dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan
diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor servo
disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian
kontrol.
Potensiometer berfungsi untuk menentukan batas
maksimum putaran sumbu (axis) motor servo. Sedangkan
sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor
servo.
Pada diagram blok pada gambar 3 merupakan gambar
keseluruhan sistem pintu air otomatis menggunakan logika fuzzy yang menjelaskan tentang
alur kerja keseluruhan sistem. Mulai sistem kontrol
keamanan pintu menggunakan pengenalan jarak dan sistem kontrol pintu otomatis menggunakan
logika fuzzy.

Gambar
3. Diagram Blok
Keluaran dan Aksi dari Sistem Pintu Air Otomatis
Menggunakan Logika fuzzy
berupa pengaturan sensor ultrasonik dan motor servo yang berjalan
mengikuti tinggi rendahnya permukaan air yang berada di atas dan bawah pintu air. Hasil
dari inputan itu kemudian akan diolah di dalam Resberry Pi untuk bisa
mengatur kipas sensor dan motor servosesuai debit air. Dengan tampilan notifikasi
lampu darurat dan buzer.

Gambar
4. Rangkaian Sistem






Perancangan fuzzy
logic di simulasikan pada software MatLab, berbentuk masukan crips dari 2 input lalu di fuzzifikasikan
dengan syarat menentukan fungsi keanggotan
dari masing – masing input. Proses tersebut merupakan masukan fuzzy yang akan di olah pada proses evaluasi aturan ( interface
) dengan menerapkan istilah IF-THEN atau jika maka. Setelah menentukan
evaluasi aturan di dapatlah keluaran fuzzy
namun keluaran tersebut masih berbentuk kata liguistik / tidak memiliki nilai (sangat cepat, cepat, sedang,…),
sehingga kita harus melakukan proses
defuzifikasi untuk mengembalikan nilai tegas / menentukan keluaran tersebut berbentuk nilai yang dapat di ketahui oleh
mikrokontroler contoh defuzifikasi dari sangat cepat pada keluaran fuzzy adalah
PWM 80% - 100%.
- · Proses masukan crips

Gambar 5. Gambar Masukan Crips I
Masukan Crips I pada kecepatan memiliki 3 fungsi
keanggotan berupa lambat, sedang, laju.
Fuzzifikasi
untuk Lambat ialah 0 rpm – 1000 rpm
Fuzzifikasi
untuk Sedang ialah 500 rpm – 2000 rpm
Fuzzifikasi
untuk Laju ialah 1650 rpm – 2700 rpm
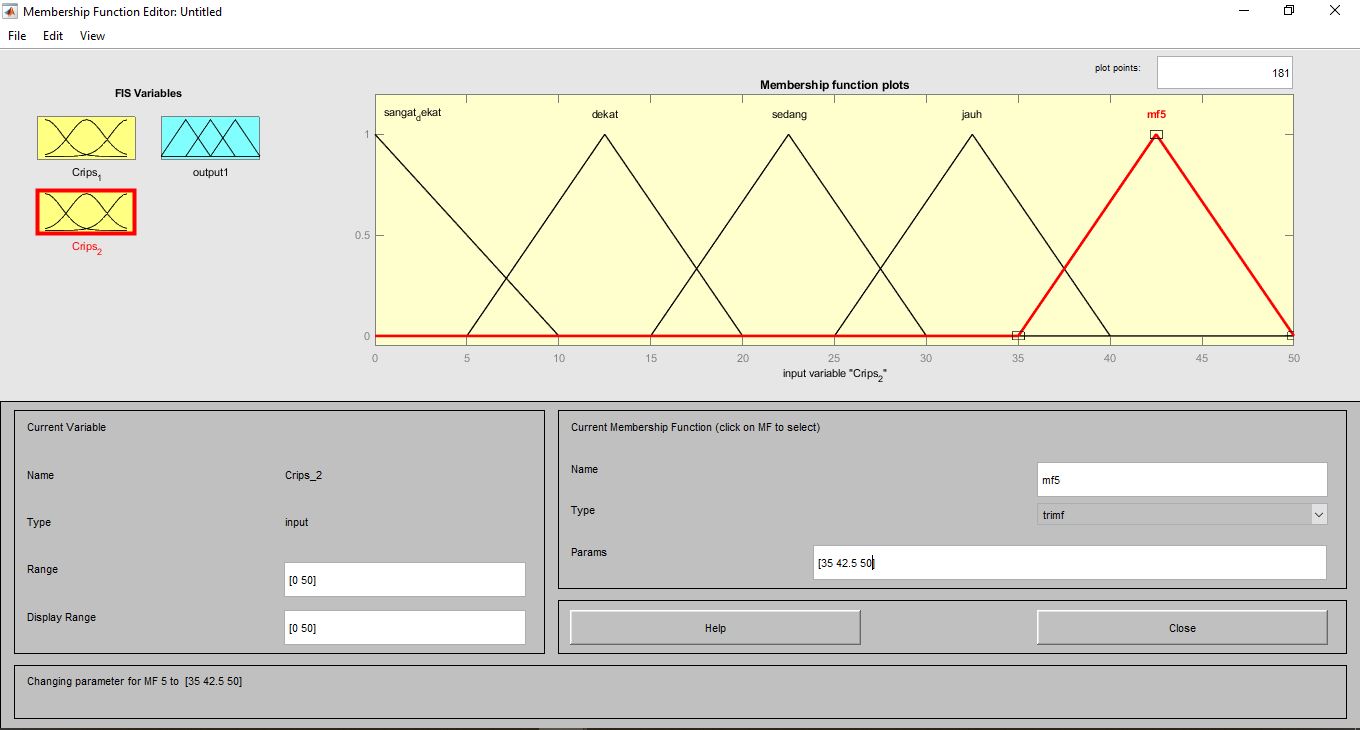
Gambar 6. Gambar Masukan Crips II
Masukan Crips II pada jarak memiliki 5 fungsi
keanggotan berupa sangat dekat, dekat, sedang, jauh, sangat jauh.
Adapun
proses fuzzifikasi dari fungsi keanggotan tersebut ialah :
Fuzzifikasi
untuk Sangat dekat : 0 cm – 10 cm
Fuzzifikasi
untuk Dekat : 5 cm – 20 cm
Fuzzifikasi
untuk Sedang : 15 cm – 30 cm
Fuzzifikasi
untuk Jauh :25 cm – 40 cm
Fuzzifikasi
untuk Sangat jauh : 35 cm – 50 cm
- Perancangan Evaluasi aturan

Gambar 7. Gambar Penentuan Rule pada MatLab
Evaluasi
aturan dari 2 masukan crips sebagai berikut :
Jika
Kecepatan = Lambat, Jarak = Sangat dekat, Maka PWM = Sangat Pelan
Jika
Kecepatan = Lambat, Jarak = Dekat, Maka PWM = Pelan
Jika
Kecepatan = Lambat, Jarak = Sedang, Maka PWM = Pelan
Jika
Kecepatan = Lambat, Jarak = Jauh, Maka PWM = Pelan
Jika
Kecepatan = Lambat, Jarak = Sangat Jauh, Maka PWM = Sedang
Jika
Kecepatan = Sedang, Jarak = Sangat dekat, Maka PWM = Pelan
Jika
Kecepatan = Sedang, Jarak = Dekat, Maka PWM = Sedang
Jika
Kecepatan = Sedang, Jarak = Sedang, Maka PWM = Sedang
Jika
Kecepatan = Sedang, Jarak = Jauh, Maka PWM = Sedang
Jika
Kecepatan = Sedang, Jarak = Sangat Jauh, Maka PWM = Cepat
Jika
Kecepatan = Laju, Jarak = Sangat dekat, Maka PWM = Sedang
Jika
Kecepatan = Laju, Jarak = Dekat, Maka PWM = Cepat
Jika
Kecepatan = Laju, Jarak = Sedang, Maka PWM = Cepat
Jika
Kecepatan = Laju, Jarak = Jauh, Maka PWM = Cepat
Jika
Kecepatan = Laju, Jarak = Sangat Jauh, Maka PWM = Sangat Cepat

Keterangan
:
Pada Jarak
:
SD = Sangat
dekat
D = Dekat
S = Sedang
J = Jauh
SJ = Sangat
Jauh
Pada
Kecepatan :
Lbt =
Lambat
S = Sedang
Lj = Laju
Pada Output
PWM :
SP = Sangat
Pelan
P = Pelan
S = Sedang
C= Cepat
SC = Sangat
Cepat

Gambar 8. Tampilan Evaluasi aturan pada Mat Lab
 Gambar 9. Grafik Surface Matlab
Gambar 9. Grafik Surface Matlab

- · Perancangan Defuzifikasi

Gambar 10. Penentuan Defuzifikasi
Defuzifikasi
merupakan memproses keluar fuzzy yang telah melewati langkah evaluasi aturan yang ber output berupa fungsi
keanggotan berupa Sangat Pelan, Pelan, Sedang, Cepat, Sangat Cepat menjadi
nilai tegasnya. Fungsi keanggotan pada keluaran ini akan di ubah menjadi
nilai yang dapat di identifikasikan oleh mikrokontroler ATMega8535
Adapun
nilai tegas yang di defuzifikasi dari keanggotan keluaran fuzzy tersebut
berupa :
Pada Sangat
Pelan = PWM 0 % - 20 %
Pada
Pelan = PWM 10 % - 40 %
Pada Sedang = PWM 30 % - 60 %
Pada Cepat = PWM 50 % - 80 %
